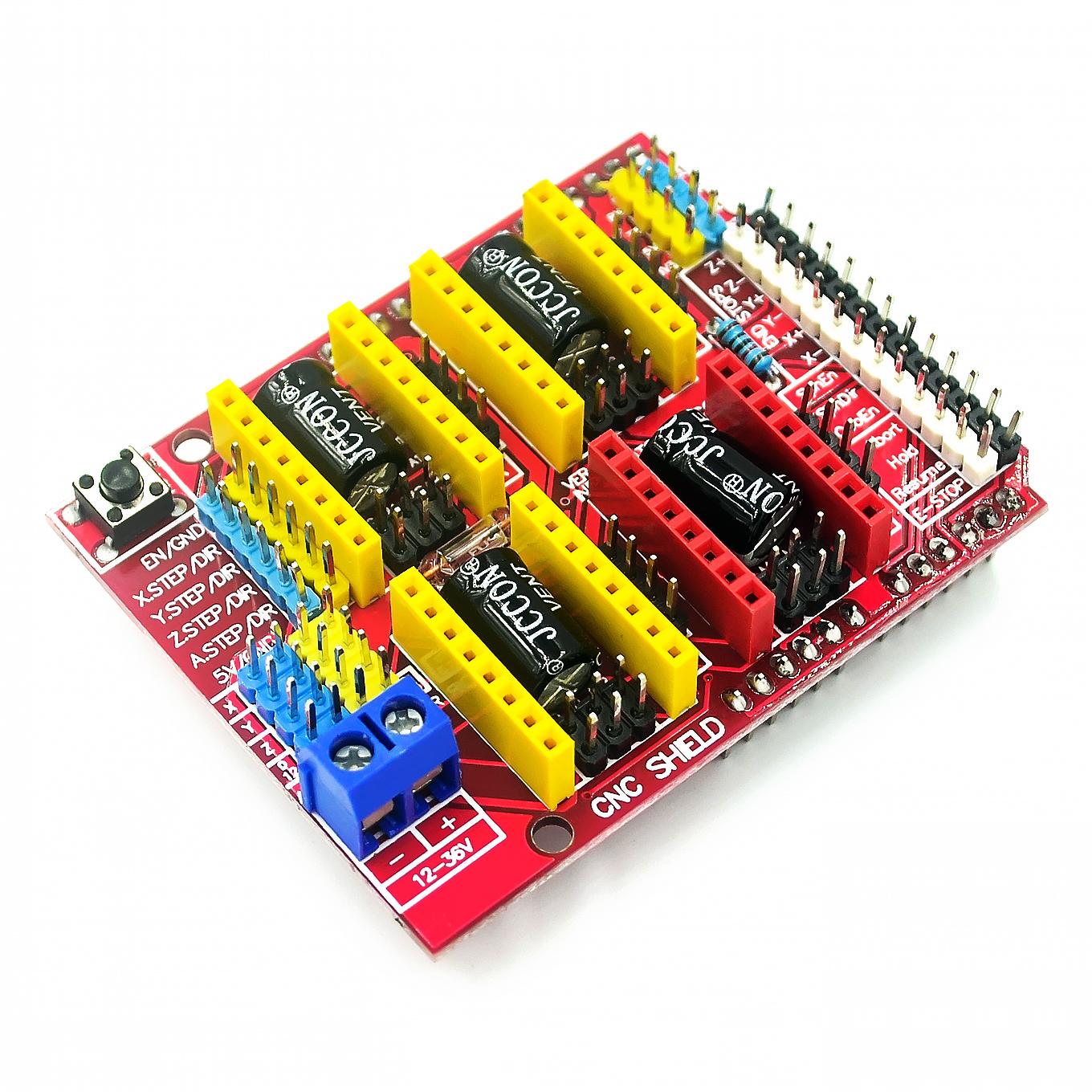
A, Product introduction
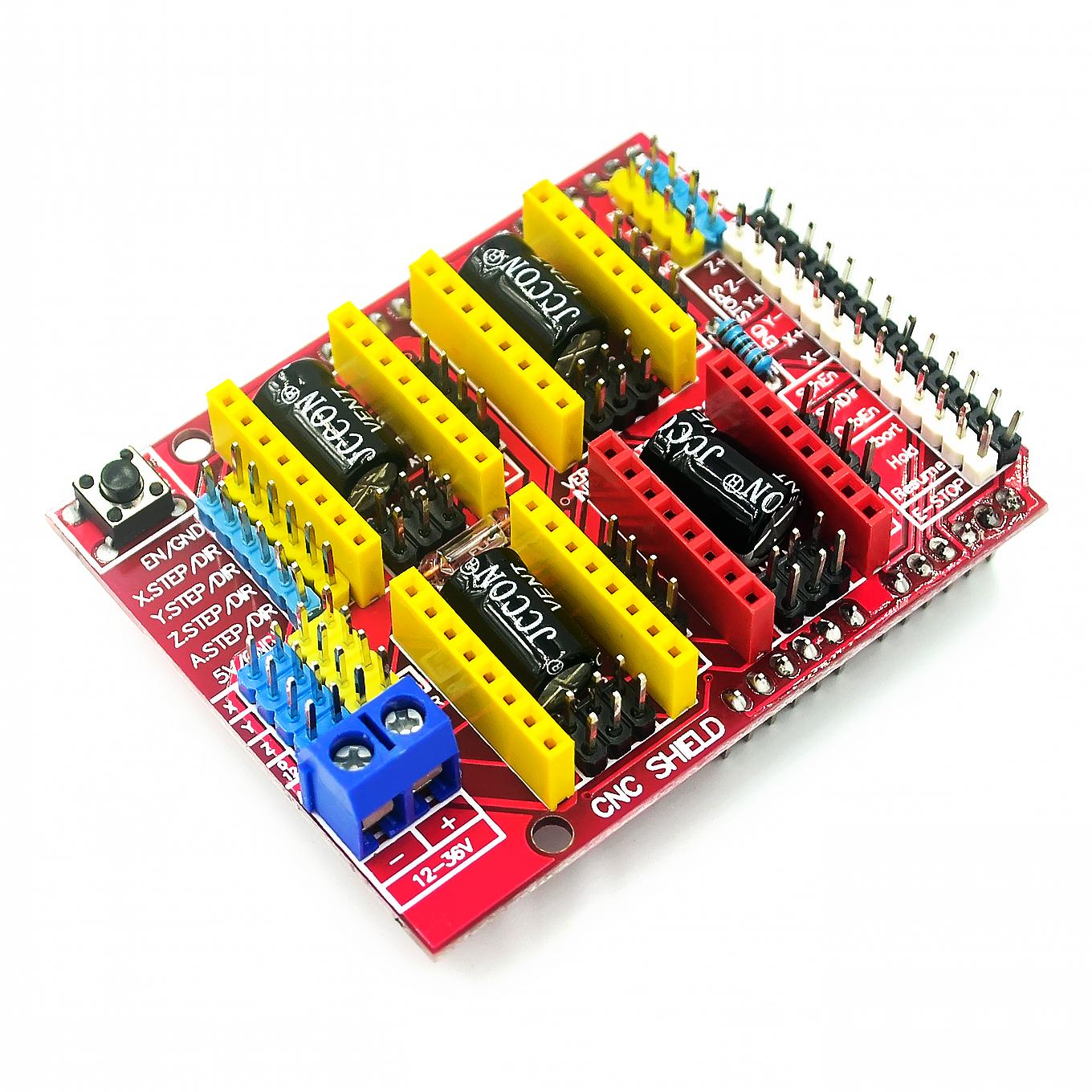
The expansion board can be used as a carving machine,3DPrinter driver expansion board, a total ofFourThe slot of the drive module of the stepper motor.Note that Moto Sako does not containA4988Stepper motor drive module, need to be in the shop to buyCan be drivenFourThe road does not enter the motor, and each step motor is only requiredTwoindividualIOMouth, that is to say,SixindividualIOMouth can be a very good managementThreeStepper motor, the use of very convenient, farewell to the traditional stepper motor cumbersome.
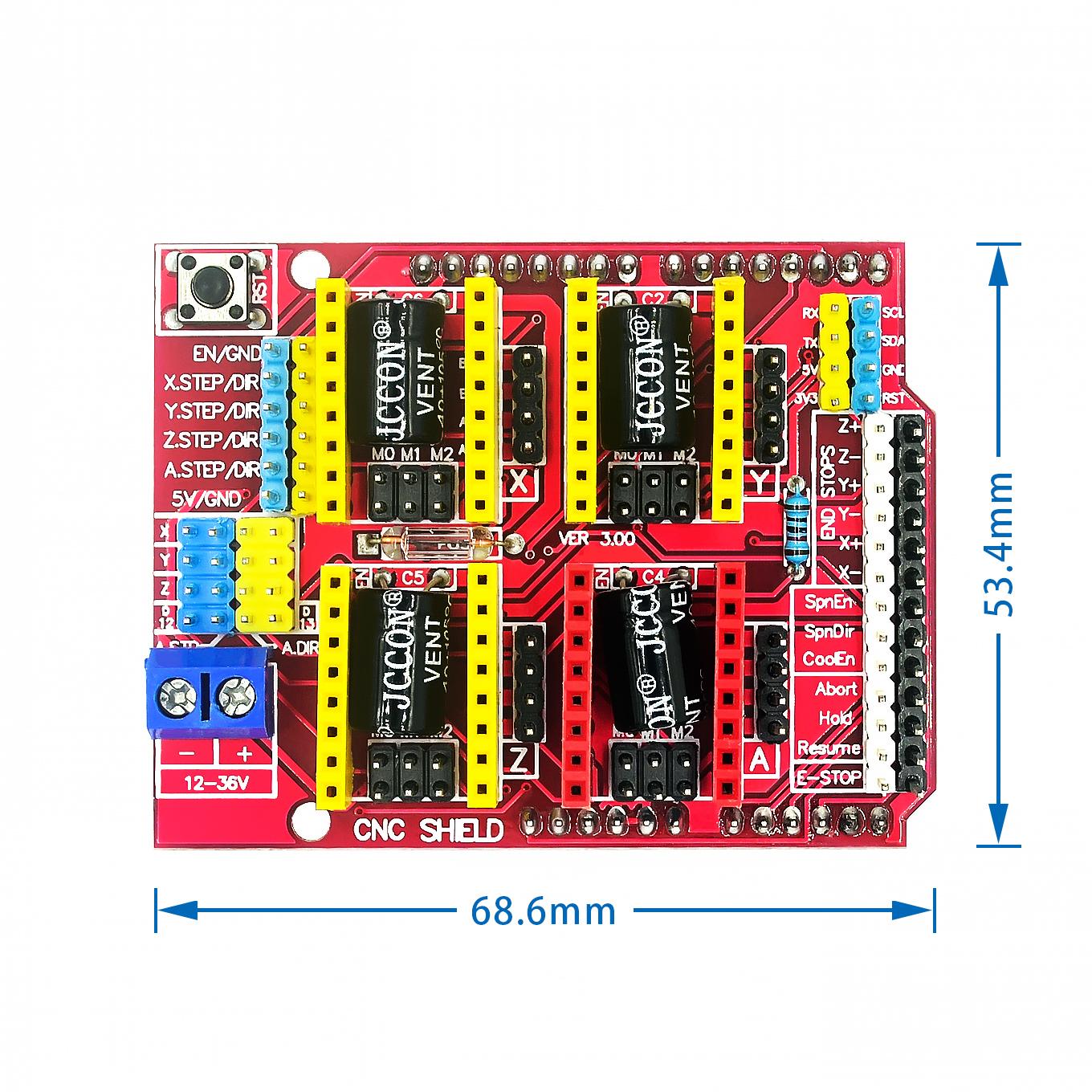
Two, UNOAnd moduleIOIntroduction to the correspondence of the mouth
Stepper motor basic control needs of the pin, the other pin is in the engraving machine, or3DThe printer when it is used, here we do not make detailed,IOCorresponding as above.
UNO----------------------Expansion board
8 ------------------------ (ENStepper motor driver to enable the end, the low level effective)
7 and Z.DIR (ZAxis direction control)
6 and Y.DIR (YAxis direction control)
5 and X.DIR (XAxis direction control)
4 conducting Z.STEP (ZAxis step control)
3 conducting Y.STEP (YAxis step control)
2 conducting X.STEP (XAxis step control)
/ /The following is a simple stepper motor control procedures,
#define EN 8 / /Stepping motor to the end, the low level effective
#define X_DIR 5 //Xaxis Stepper motor direction control
#define Y_DIR 6 //yaxis Stepper motor direction control
#define Z_DIR 7 //zaxis Stepper motor direction control
#define X_STP 2 //xaxis Step control
#define Y_STP 3 //yaxis Step control
#define Z_STP 4 //zaxis Step control
*
/ /Function:StepFunction: control the direction of the stepper motor, step by step.
/ /Parameters:DirDirection controlDirPin,Corresponding to the stepper motorDIRPin,StepperPinCorresponding to the stepper motorStepPin,StepsNumber of steps
/ /No return value
* /
Void step (Boolean dir byte dirPin,, byte stepperPin int steps,)
{
(digitalWrite dirPin, dir);
Delay (50);
For (int i = 0; I < steps; i++) {
DigitalWrite (stepperPin, HIGH);
DelayMicroseconds (800);
DigitalWrite (stepperPin, LOW);
DelayMicroseconds (800);
}
}
Void (setup) {//Will be used in the stepper motorIOPin is set to output
(pinMode X_DIR, OUTPUT); pinMode (X_STP, OUTPUT);
(pinMode Y_DIR, OUTPUT); pinMode (Y_STP, OUTPUT);
(pinMode Z_DIR, OUTPUT); pinMode (Z_STP, OUTPUT);
(pinMode EN, OUTPUT);
(digitalWrite EN, LOW);
}
Void (loop) {
(step false, X_DIR, X_STP, 200); //XShaft motor reversalOneRing,Two hundredStep for a circle
(step false, Y_DIR, Y_STP, 200); //yShaft motor reversalOneRing,Two hundredStep for a circle
(step false, Z_DIR, Z_STP, 200); //zShaft motor reversalOneRing,Two hundredStep for a circle
Delay (1000);
(step true, X_DIR, X_STP, 200); //XShaft motor ForwardOneRing,Two hundredStep for a circle
(step true, Y_DIR, Y_STP, 200); //yShaft motor ForwardOneRing,Two hundredStep for a circle
(step true, Z_DIR, Z_STP, 200); //zShaft motor ForwardOneRing,Two hundredStep for a circle
Delay (1000);
}
Experimental phenomena: a turn of the stepper motor, pauseOneSecond, then a story circle, so the cycle.
It is worth noting that in theA4988When the module is not plugged in, step motor connection mode is:
2A, 2BFor a group (red, green),1A, 1BFor a group (blue, yellow) would like to change direction, change the location of one group can be, for example2A,and2BExchange.
Description Product
CNC Shield Board:
Latest CNC Shield Version 3
0.9 compatible. GRBL (open source firmware that runs on an uno that turns the G-code commands into stepper 37signals)
PWM Spindle and direction pins
4-Axis support (X, Y, Z, A-Can duplicate X, Y Z, or do a full 4th axis with custom firmware using pins D12 and D13)
2 x End stops for each axis (6 in total)
Coolant enable
Uses removable A4988 or DRV8825 compatible stepper drivers
Jumpers to set the Micro-Stepping for the stepper. (some drivers like the DRV8825 can do up to 1 / 32 micro-stepping)
Compact design.
Stepper Motors can be connected with pin Molex connectors or soldered 4 in place.
Runs on 12-36v DC. (at the moment only the DRV8825 drivers can handle up to 36V so please consider the operation voltage when powering the.)